

Na de succesvolle FAT (Factory Acceptance Test) net voor de vakantie, stond de afronding en het inbouwen na de vakantie op het lijstje. Omdat ik de magnetometer niet goed gekalibreerd krijg, en dat waarschijnlijk met deze processor ook niet gaat lukken omdat ie te traag is, heb ik besloten de magnetometer er voorlopig uit te laten.
Ik heb ook besloten om zelf kastjes te gaan maken voor de Buck-converter, de TTL converter en de NMEAtor. Via Youtube heb ik aardige filmpjes gezien (The Ben Heck Show) hoe je met een graveerplaat dit soort kastjes zelf kan maken.
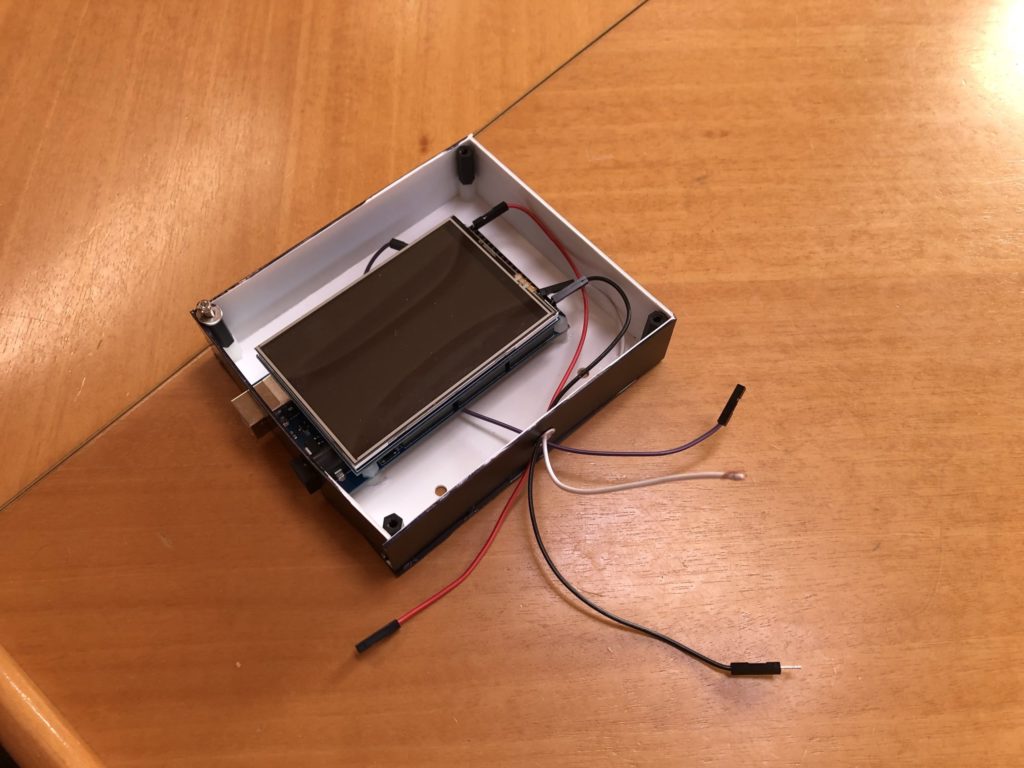
Om rond het scherm niet een te dunne rand over te houden, die ik niet uit de graveerplaat kan snijden zonder breken, maak ik een kastje van 100x110x25mm. Ook de Buckconverter, om van 12V terug te schalen naar 7.5V voor de Arduino, krijgt een eigen kastje., net zoals de RS422<->TTL converter. Deze worden beiden aan de achterkant van de klep gemonteerd, uit het zicht. De laatste 2 kastjes worden helemaal verlijmd. het kastje van NMEAtor krijgt een geschroefde deksel.
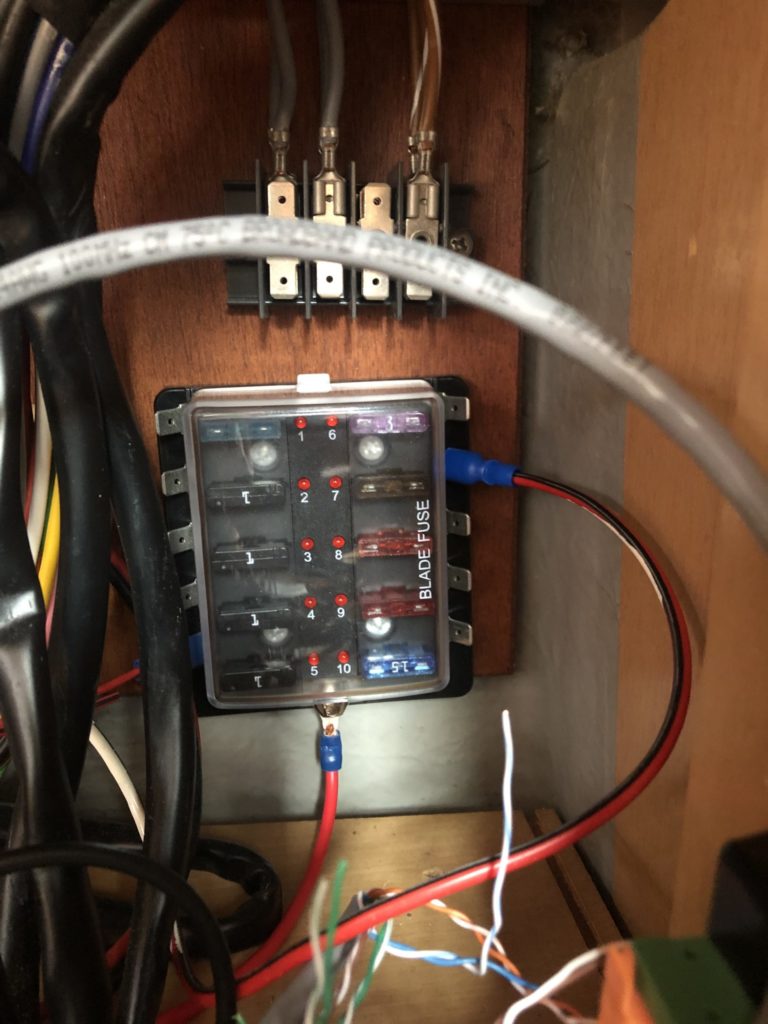
Omdat ik geen vrije aansluitingen meer heb op het de voedingsstrip, moet ik ook een extra, met zekeringen uitgevoerde, voedingstrip plaatsen en wat aansluitingen omleggen. De NMEAtor maakt onderdeel uit van het boordnavigatie netwerk en moet daarmee ook worden ingeschakeld. Ik verhuis dus wat permanente aansluitingen (USB en Navtex) naar de nieuwe voedingsstrip en hou zodoende twee zekering houder over, waarvan ik er een gebruik voor de voeding van de NMEAtor.
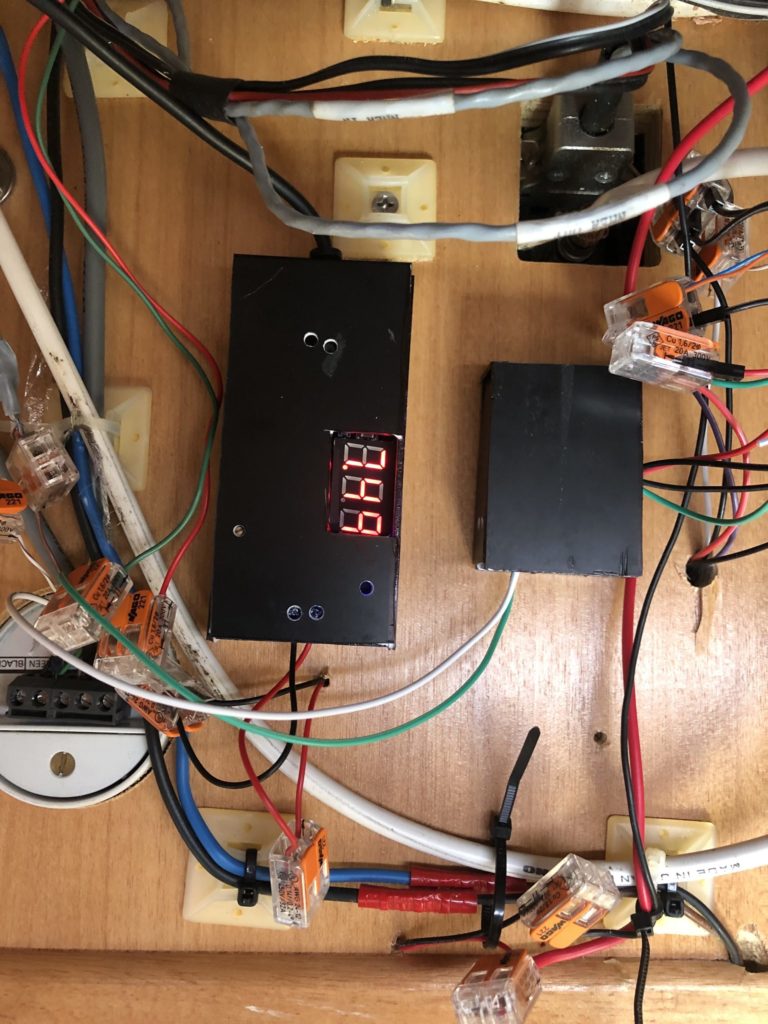
Na afmontage ziet het er in mijn ogen niet onaardig uit en alles werkt naar behoren. Versie 1.0 draait vanaf nu aan boord.

Nu zien hoe het zich houdt tijdens het zeilen en optimaliseren.
update 30-04-2021; Arduino maakt plaats voor ESP-32
In de praktijk bleek er toch af en toe een bericht verminkt te raken in de NMEAtor. Uit analyse blijkt dat het LCD scherm dusdanig veel vertraging in het proces veroorzaakt. Het LCD scherm is een “domme” display; zonder eigen CPU en RAM en elke pixel moet dus door de Arduino aangeleverd worden en dat kost tijd; te veel tijd voor een 100% zekere werking.
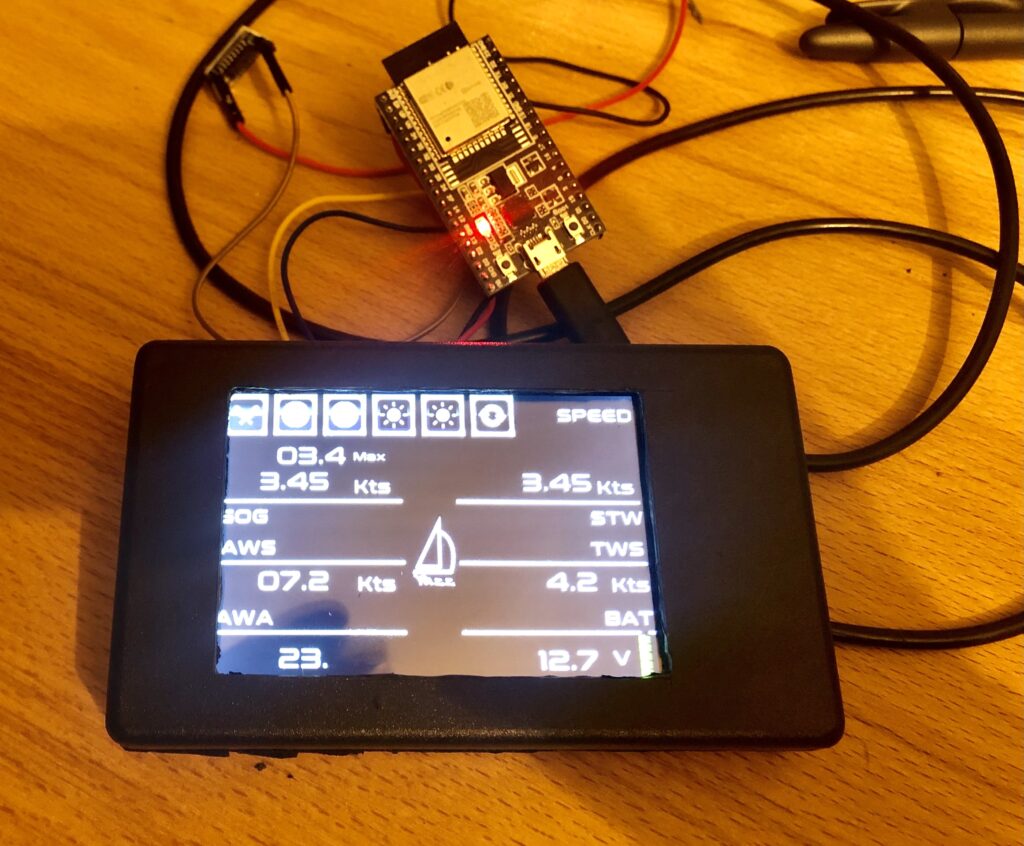
Omdat ik heb gemerkt dat de ESP-32 zoveel krachtiger is dan de Arduino Mega2560 en ik er nog 2 heb liggen, heb ik besloten een ESP versie van de NMEAtor te bouwen. De software is hier te vinden. Daarnaast heb ik nog een intelligente Nextion 3,5″ display uit de eerste fase van de Winddisplay over. Tezamen is dit een krachtige combi die de taken ruimschoots aan kan. Ook nu gebruik ik weer een RS-232 <-> TTL converter om de signalen uit het netwerk tot 3,3V aan de ESP aan te bieden via 1 van de 3 UARTS van de ESP. Een 2de UART wordt gebruikt om het beeldscherm aan te sturen op TTL niveau. Tot slot gebruik een Softwareserial poort om de data op RS-232 niveau op 38.400 Bd aan de multiplexer aan te bieden.
NMEAtor display 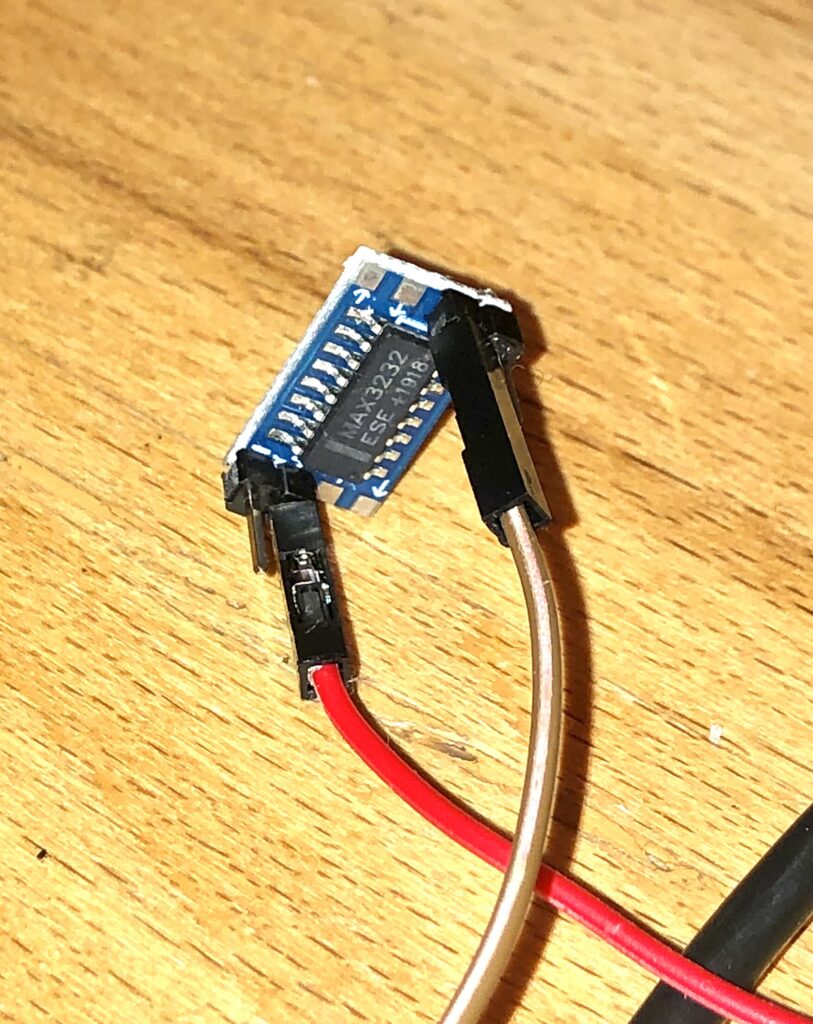
RS-232<->TTL converter


De keukentafel-test (FAT) is goed verlopen. Nu moet er is nog een test aan boord met het echte netwerk gedaan worden (SAT). Daarna moet de ESP samen met de RS-232<->TTL converter in een doosje gebouwd worden en dan kan het aan boord geïnstalleerd worden. Ik heb nog voldoende materiaal liggen, dus ik zal handmatig zo’n kastje maken.



{kind=link}
{kind=link}
{kind=link}
{kind=link}